By Marco Arruda
In this post you’ll learn how to publish to a ROS2 topic using ROS2 C++. Up to the end of the video, we are moving the robot Dolly robot, simulated using Gazebo 11.
You’ll learn:
- How to create a node with ROS2 and C++
- How to public to a topic with ROS2 and C++
1 – Setup environment – Launch simulation
Before anything else, make sure you have the rosject from the previous post, you can copy it from here.
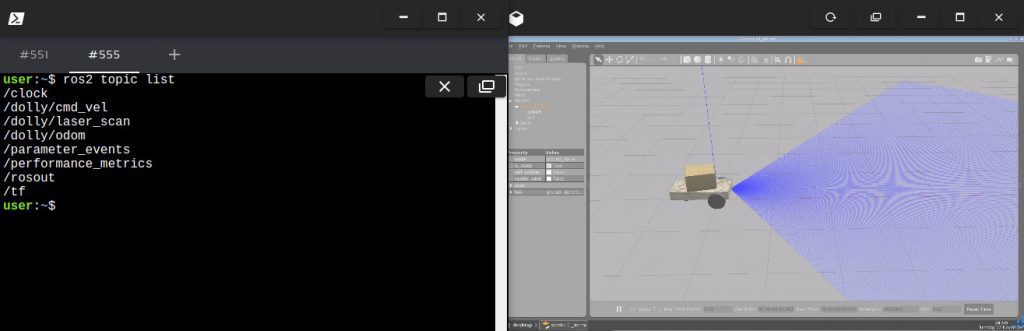
Launch the simulation in one webshell and in a different tab, checkout the topics we have available. You must get something similar to the image below:
2 – Create a topic publisher
Create a new file to container the publisher node: moving_robot.cpp and paste the following content:
#include <chrono>
#include <functional>
#include <memory> #include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/twist.hpp" using namespace std::chrono_literals; /* This example creates a subclass of Node and uses std::bind() to register a * member function as a callback from the timer. */ class MovingRobot : public rclcpp::Node {
public: MovingRobot() : Node("moving_robot"), count_(0) { publisher_ = this->create_publisher("/dolly/cmd_vel", 10); timer_ = this->create_wall_timer( 500ms, std::bind(&MovingRobot::timer_callback, this)); } private: void timer_callback() { auto message = geometry_msgs::msg::Twist(); message.linear.x = 0.5; message.angular.z = 0.3; RCLCPP_INFO(this->get_logger(), "Publishing: '%f.2' and %f.2", message.linear.x, message.angular.z); publisher_->publish(message); } rclcpp::TimerBase::SharedPtr timer_; rclcpp::Publisher::SharedPtr publisher_; size_t count_;
}; int main(int argc, char *argv[]) { rclcpp::init(argc, argv); rclcpp::spin(std::make_shared()); rclcpp::shutdown(); return 0;
}QoS (Quality of Service)
Similar to the subscriber it is created a class that inherits Node. A publisher_ is setup and also a callback, although this time is not a callback that receives messages, but a timer_callback called in a frequency defined by the timer_ variable. This callback is used to publish messages to the robot.
The create_publisher method needs two arguments:
- topic name
- QoS (Quality of Service) – This is the policy of data saved in the queue. You can make use of different middlewares or even use some provided by default. We are just setting up a queue of 10. By default, it keeps the last 10 messages sent to the topic.
The message published must be created using the class imported:
message = geometry_msgs::msg::Twist();
We ensure the callback methods on the subscribers side will always recognize the message. This is the way it has to be published by using the publisher method publish.
3 – Compile and run the node
In order to compile we need to adjust some things in the ~/ros2_ws/src/my_package/CMakeLists.txt. So add the following to the file:
- Add the geometry_msgs dependency
- Append the executable moving_robot
- Add install instruction for moving_robot
find_package(geometry_msgs REQUIRED)
...
# moving robot
add_executable(moving_robot src/moving_robot.cpp)
ament_target_dependencies(moving_robot rclcpp geometry_msgs)
...
install(TARGETS moving_robot reading_laser DESTINATION lib/${PROJECT_NAME}/
)
We can run the node like below:
source ~/ros2_ws/install/setup.bash
ros2 run my_package

Related courses & extra links:
The post Exploring ROS2 using wheeled Robot – #3 – Moving the Robot
appeared first on The Construct.
The Construct Blog