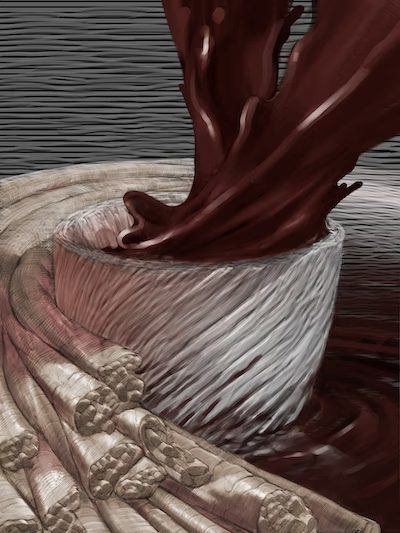
Fiber-infused ink enables 3D-printed heart muscle to beat Blog Fiber-infused ink enables 3D-printed heart muscle to beat
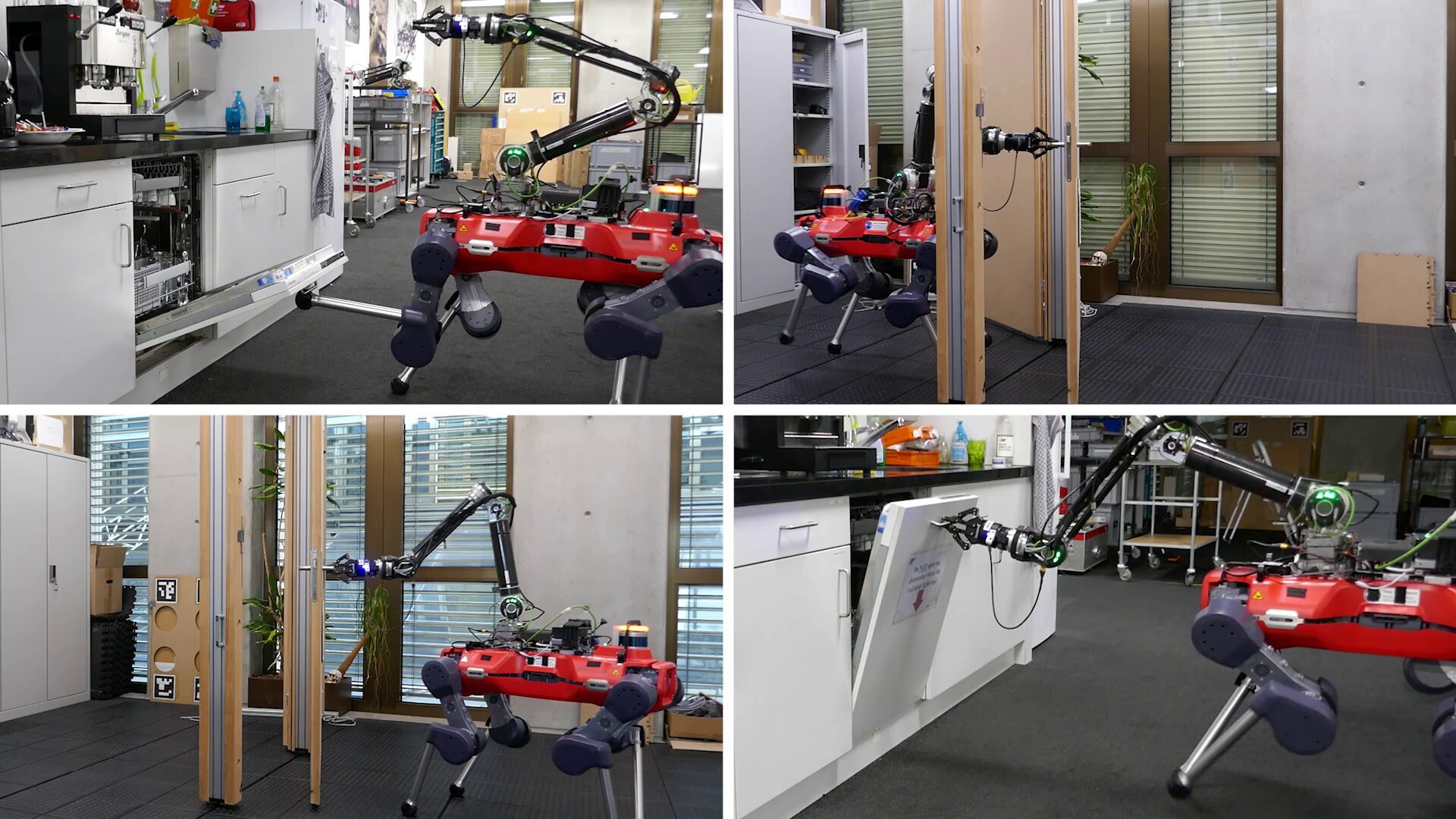
Interview with Jean Pierre Sleiman, author of the paper “Versatile multicontact planning and control for legged loco-manipulation” Blog Interview with Jean Pierre Sleiman, author of the paper “Versatile multicontact planning and control for legged loco-manipulation”
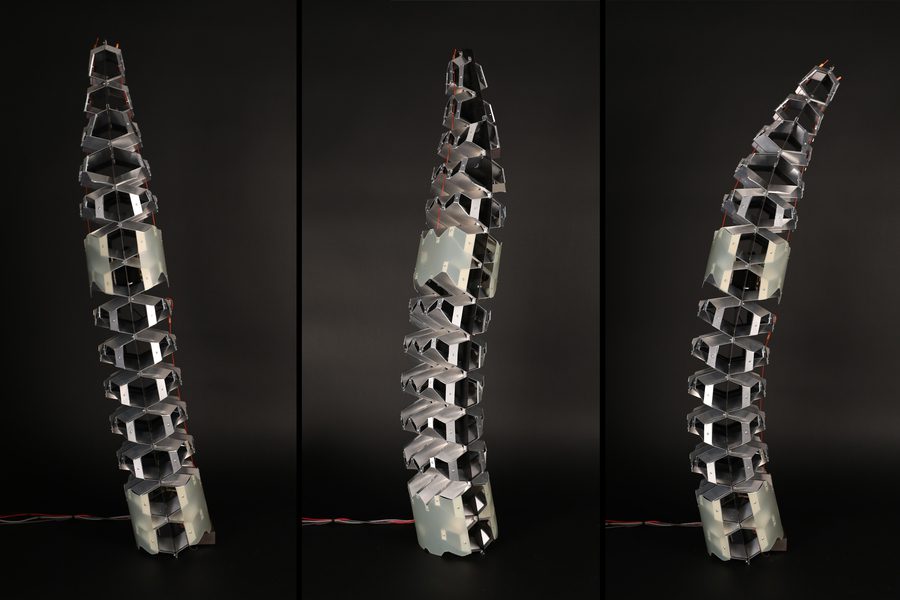
MIT engineers use kirigami to make ultrastrong, lightweight structures Blog MIT engineers use kirigami to make ultrastrong, lightweight structures
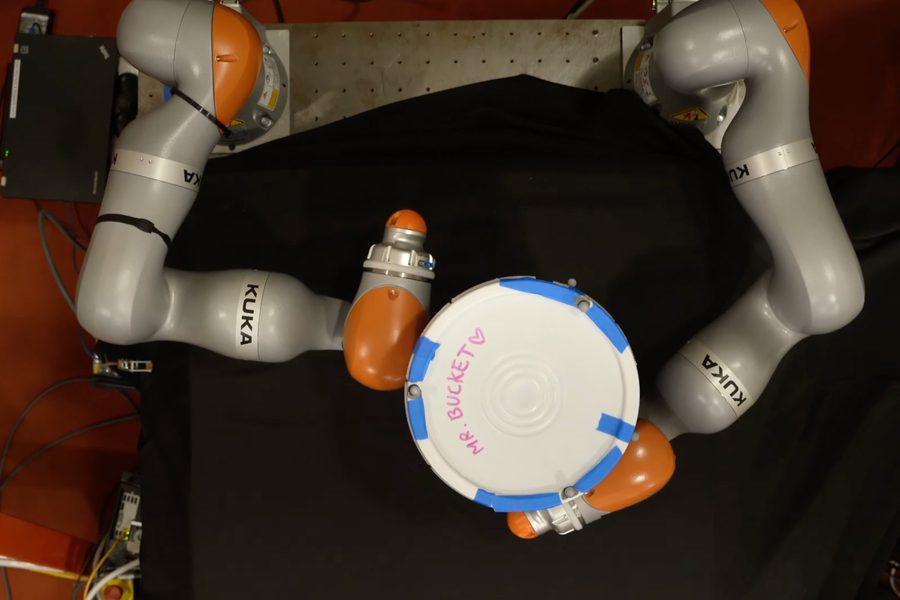
New dual-arm robot achieves bimanual tasks by learning from simulation Blog New dual-arm robot achieves bimanual tasks by learning from simulation
AI helps robots manipulate objects with their whole bodies Blog AI helps robots manipulate objects with their whole bodies
SVR Guide to Robotics Research and Education 2023 Blog SVR Guide to Robotics Research and Education 2023
Mobile robots get a leg up from a more-is-better communications principle Blog Mobile robots get a leg up from a more-is-better communications principle